

완구드론에 아크로 펌웨어 올리기 소개글 : http://cafe.naver.com/drone114/441
E011 구입기 : http://cafe.naver.com/drone114/569
2. Eachine E011 아크로 펌웨어 수정하기 : http://cafe.naver.com/drone114/584
1. Eachine E011 아크로 모드 펌업하기
준비물
- Eachine E011 기체 BNF 뱅굿 링크 : https://goo.gl/CiJ7ru
- ST-Link V2 뱅굿 링크 : https://goo.gl/2Bg5Kr
- ST-Link V2 유틸리티 다운로드 : https://goo.gl/Dj64P3
- silver13/Eachine-E011 아크로 펌웨어 다운로드 : https://github.com/silver13/Eachine-E011
1. silver13/Eachine-E011 아크로 펌웨어 다운로드
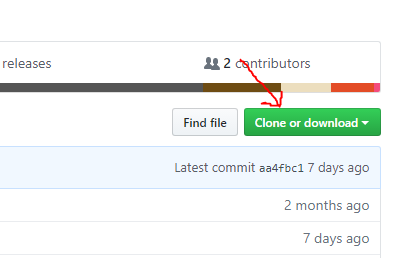
https://github.com/silver13/Eachine-E011 이 링크를 얼어 주세요
우측에 녹색 버튼을 클릭합니다.
Download ZIP 을 클릭합니다.
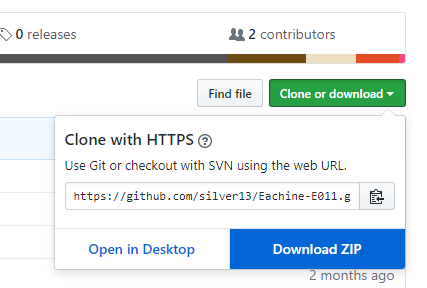
Eachine-E011-master.zip 파일이 다운로드 됩니다.
적당한 위치에 저장하고 압축을 풀어줍니다.
압축이 풀린 경로를 기억하고 계세요
위 방법이 깃허브에서 소스를 다운로드 받는 방법입니다.
사실 첨부파일의 e011_default_new.hex 파일만 있으면 펌업이 가능하지만 깃허브에서 소스 받는걸 해보시라고 적었습니다.
첨부파일의 E011_Rate660_Expo05.hex 파일은 레이트 660으로 Expo를 0.5로 변경하여 컴파일한 펌웨어파일입니다.
첨부파일의 E011_Rate960_Expo05.hex 파일은 레이트 960으로 Expo를 0.5로 변경하여 컴파일한 펌웨어파일입니다.
e011_default_new.hex 파일로 펌업을 하면 레이트값이 360 이라 그런지 회전이 빠르지 않아 수동플립이 어렵습니다
E011_Rate660_Expo05.hex 파일은 수동플립이 가능합니다.
E011_Rate960_Expo05.hex 파일은 아직 테스트 해보지 않았습니다.
2. ST-Link V2 유틸리티 다운로드 및 설치
ST-Link V2 소프트웨어를 다운받습니다.
http://www.st.com/en/embedded-software/stsw-link004.html
위 링크를 클릭하세요
페이지 하단에 Get Software 버튼을 클릭하고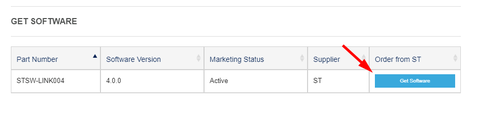
라이센스에 동의한다고 버튼을 누른 후
이름과 이메일 주소를 입력하고 다운로드 버튼을 클릭하면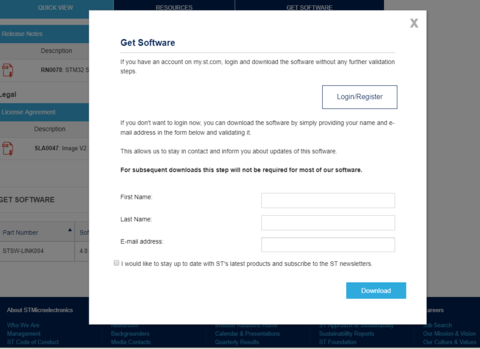
입력한 이메일 주소로 유효한 이메일인지 확인하는 메일이 옵니다.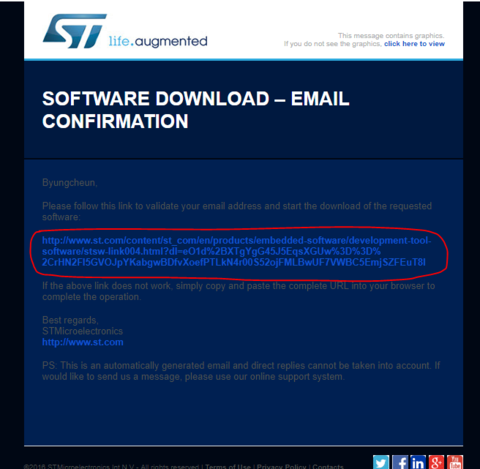
해당 메일을 확인하고 다운로드 링크를 클릭하면 ST-Link 유틸리티 파일 (en.stsw-link004.zip) 이 다운로드 됩니다.
다운받은 파일을 압축을 풀고 STM32 ST-LINK Utility v4.0.0 setup.exe 파일을 실행해서 설치합니다.
중간에 드라이버 설치가 나오는데 꼭 설치하세요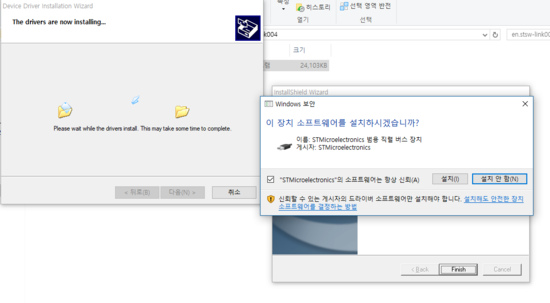
3. ST-Link 와 E011 보드 연결
우선 기체를 분해합니다.

고정부분을 살짝 열어서 뚜껑을 분해하고
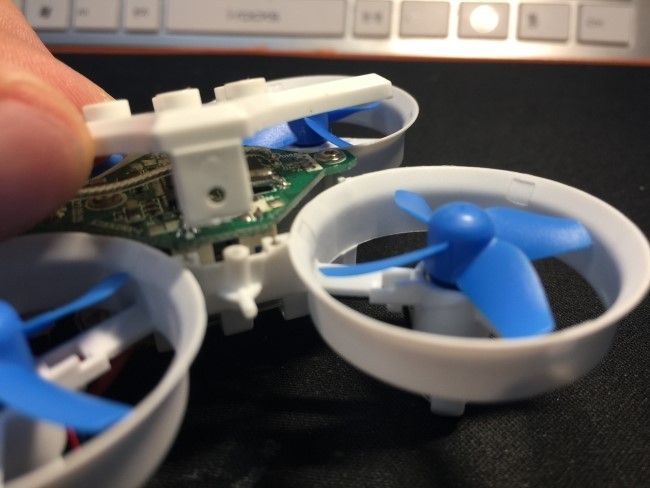
나사를 풀면 기판이 분해 되는데 이때 살짝 들어서 모터 연결선을 분리해줍니다.

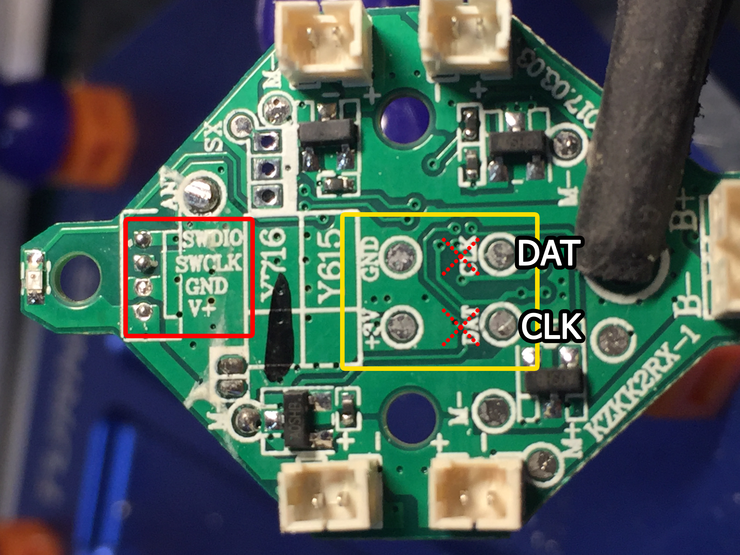
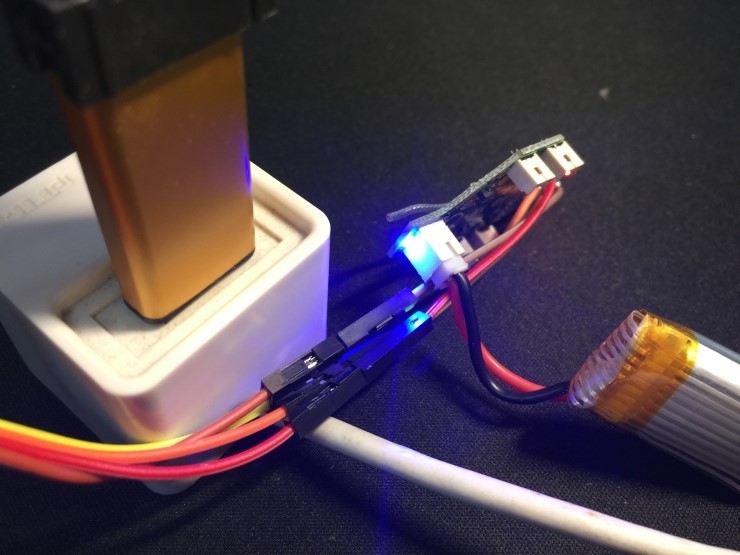
이제 보드를 보면 위 그림처럼 펌웨어를 쓰기 위해서 ST-Link를 연결할 수 있는 부분이 두군데 입니다.
왼쪽에 빨간 박스친 일열로 홀이 있는 부분과
정 가운데 노란 박스친 4개의 큰 접점이 있는 부분입니다.
두 곳중 한곳에 작업하면 됩니다.
주의할점은 오른쪽 노란색 박스 부분의 DAT와 CLK의 인쇄가 뒤바뀌어 있습니다.
DAT가 CLK이고 CLK가 DAT 입니다.. 헤깔리지 않게 유의 하세요
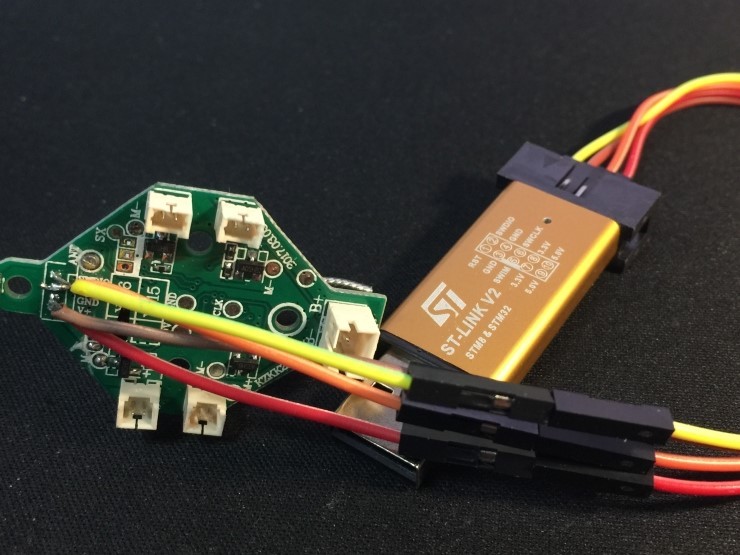
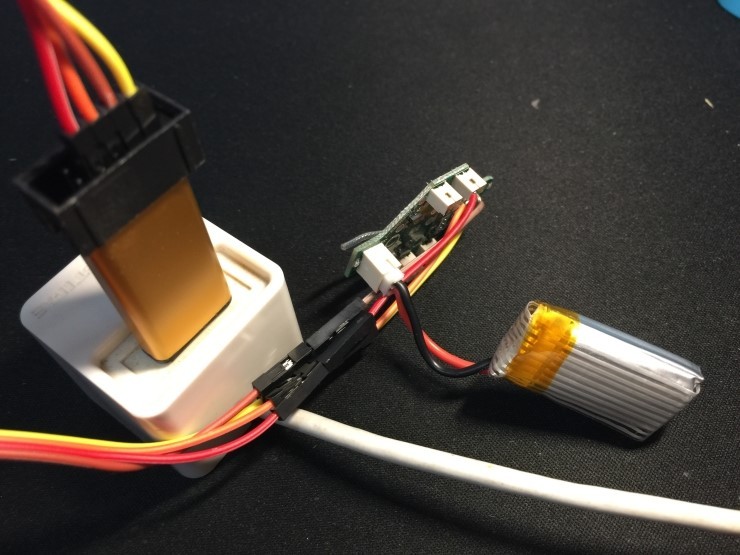
ST-Link 와 E011 보드를 연결해 줍니다.
빨간부분 연결은 아래 표와 같습니다.
| ST-Link | E011 보드 | |
|---|---|---|
| GND | <-> | GND |
| 3.3v | <-> | V+ |
| SWCLK | <-> | SWCLK |
| SWDIO | <-> | SWDIO |
노란부분 연결은 아래와 같습니다.
| ST-Link | E011 보드 | |
|---|---|---|
| GND | <-> | GND |
| 3.3v | <-> | V+ |
| SWCLK | <-> | CLK (DAT로 인쇄되어 있음) |
| SWDIO | <-> | DAT (CLK로 인쇄되어 있음) |
전 빨간 부분에 작업했습니다.
갈색선을 양쪽 GND에
빨간선을 V+ 과 3.3V에
주황선을 SWCLK와 SWCLK에
노란선을 SWDIO와 SWDIO에 연결해 주었습니다.
4. ST-Link 유틸 실행
ST-Link를 USB에 연결합니다.
FC보드에 파란 LED가 켜질거에요

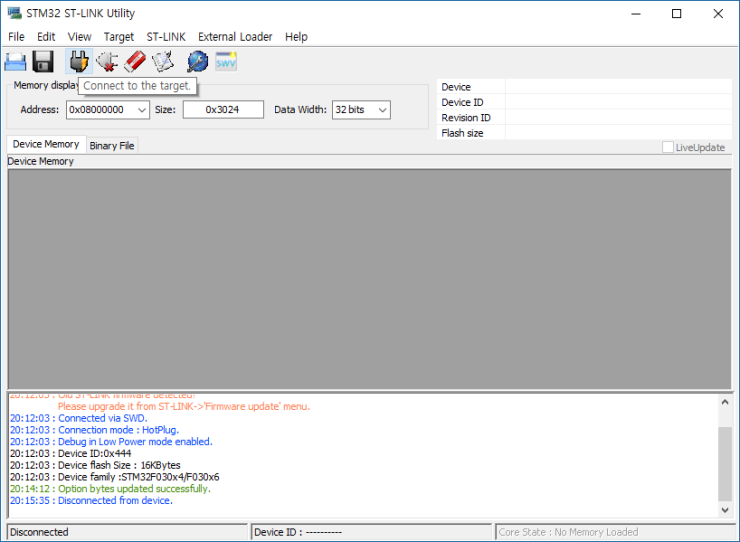
이제 PC에서 아까 설치한 ST-Link 유틸리티를 실행합니다.
![]()
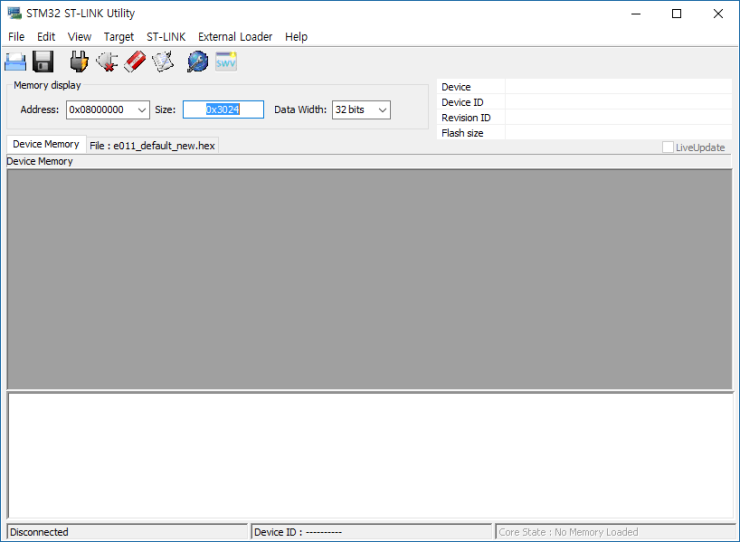
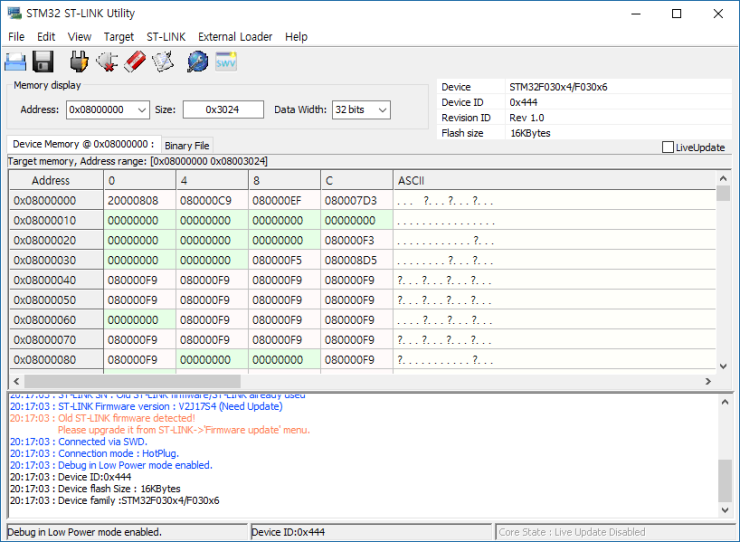
Connect 아이콘을 클릭해서 연결합니다.
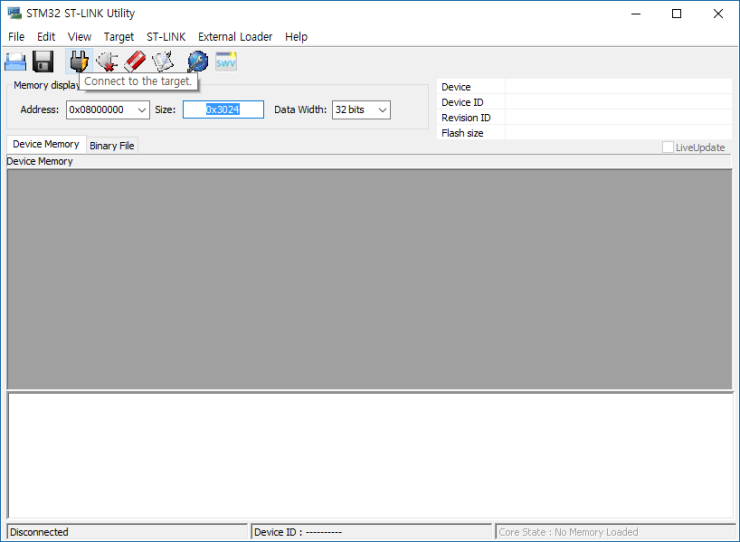
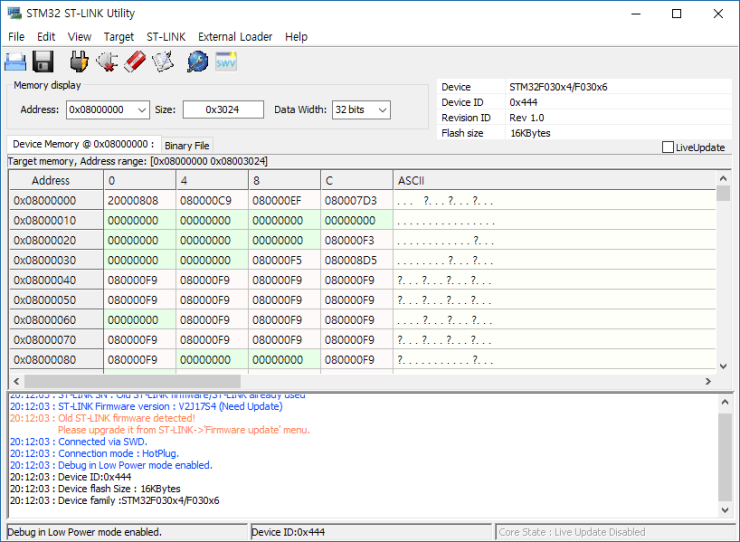
아래 그림과 같이 정상적으로 연결되야 합니다.
만약 에러가 표시된다면 ST-Link와 보드의 배선을 다시 확인해 보세요
이제 E011의 오리지널 펌웨어를 지웁니다.
Target > Option Bytes.. 아래 그림과 같이 메뉴를 따라가서 클릭하시거나 단축키 컨트폴+B 키를 눌러서 실행합니다.
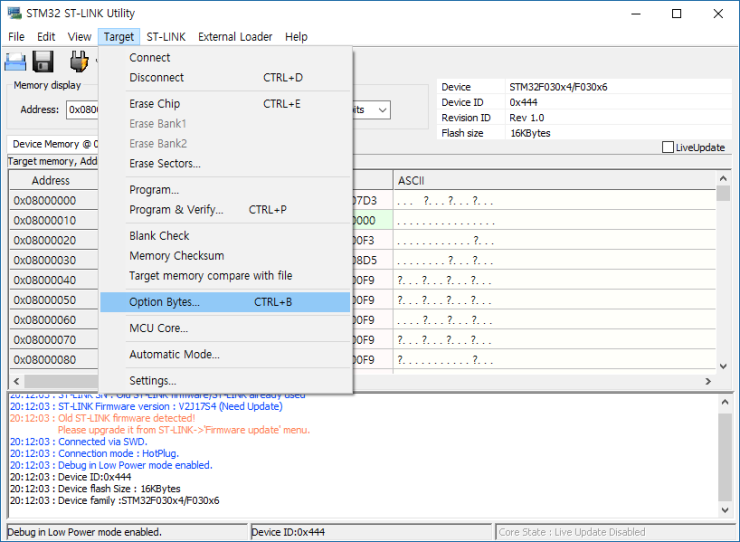
아래와 같이 옵션 바이트 창이 뜹니다.
왼쪽 상단에 Read Out Protection 을 Level0 으로 선택하시고 하단의 Apply 버튼을 클릭하면 기존 펌웨어를 지우게 됩니다.
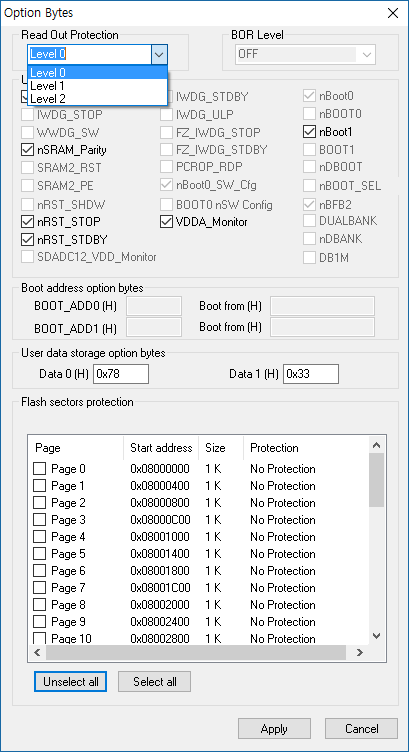
지우기 완료되었습니다.
이제 아래 그림처럼 아이콘을 클릭해서 연결을 해제합니다.
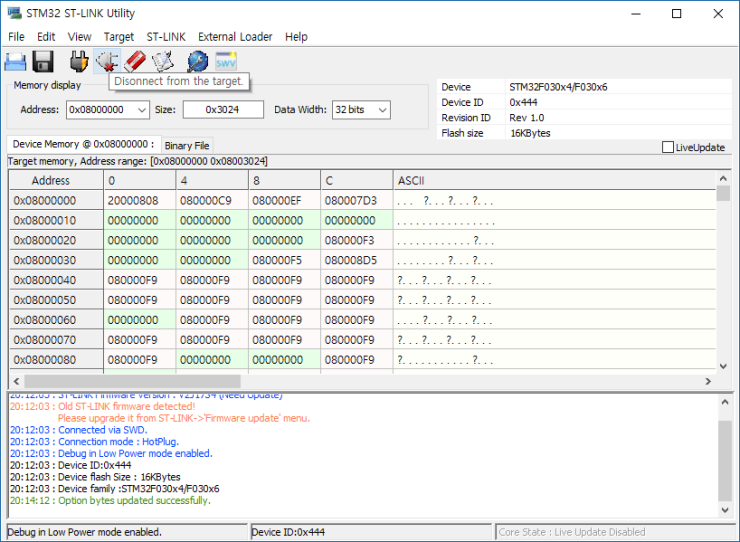
좀전과 다르게 보드에 LED가 아무것도 들어오지 않습니다.
보드에 배터리를 연결해 줍니다.
아직도 LED는 켜지지 않습니다.
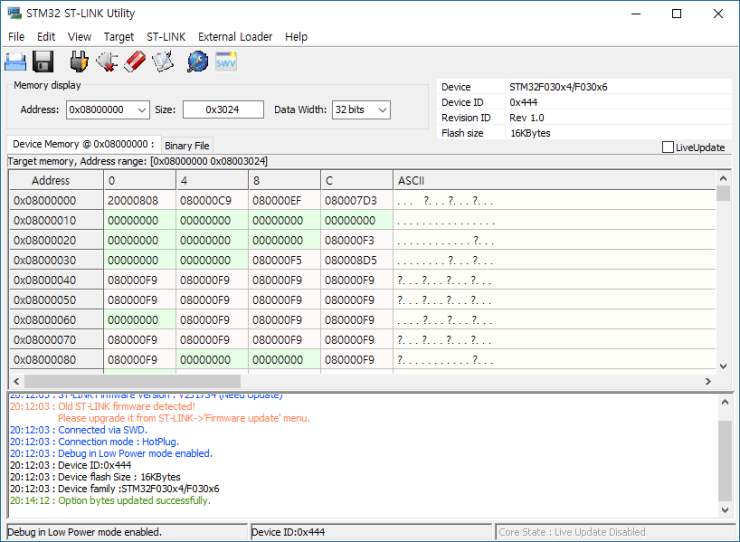
이제 SK-Link 툴에서 다시 연결해 줍니다.
연결이 완료되면 아래 그림처럼 됩니다.
이제 새로 쓸 펌웨어를 열어줍니다.
컨트롤 + O 키 를 누르거나 아래 그림처럼 따라가서 오픈파일을 클릭합니다.
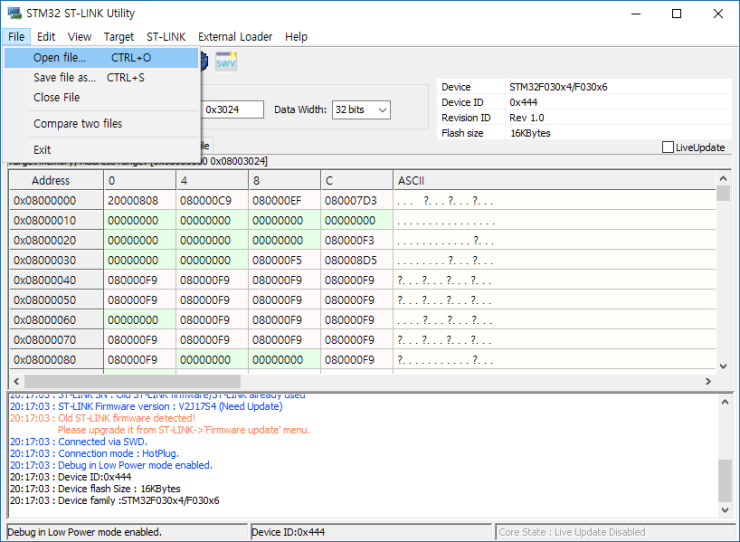
탐색창이 뜹니다.
아까 미리 받았던 Eachine-E011-master.zip 파일을 압축 풀은 폴더의 아래에 Eachine-E011-master\bin\e011_default_new.hex 파일이 새로 올릴 펌웨어 입니다.
e011_default_new.hex 파일을 선택해 줍니다.
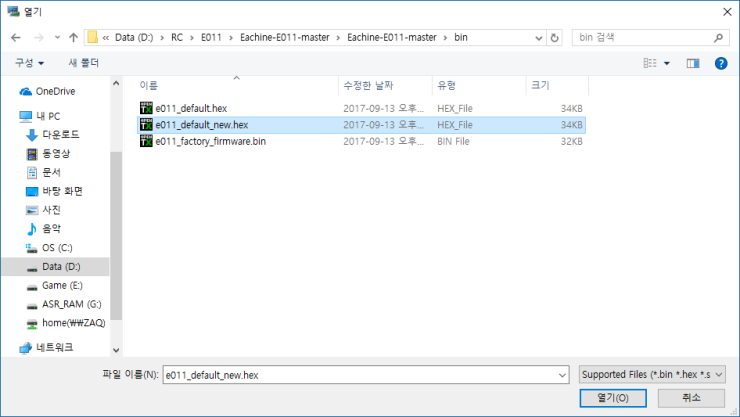
만일 본인에 맞게 설정을 바꾸고 컴파일한 헥사 파일이 있다면 해당 파일을 열어주면 됩니다.
이제 새로운 펌웨어를 올릴 차례입니다.
아래 그림과 같이 따라가서 Program & Verify 를 클릭 하거나 컨트롤 + P 키를 눌러줍니다.
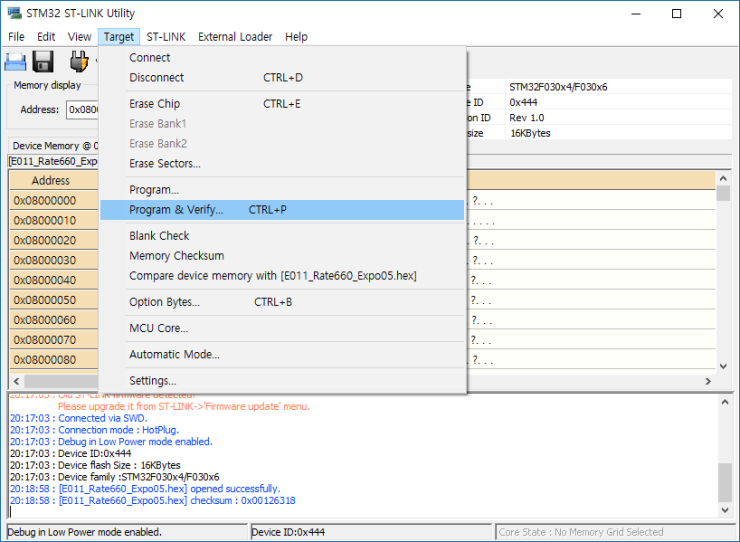
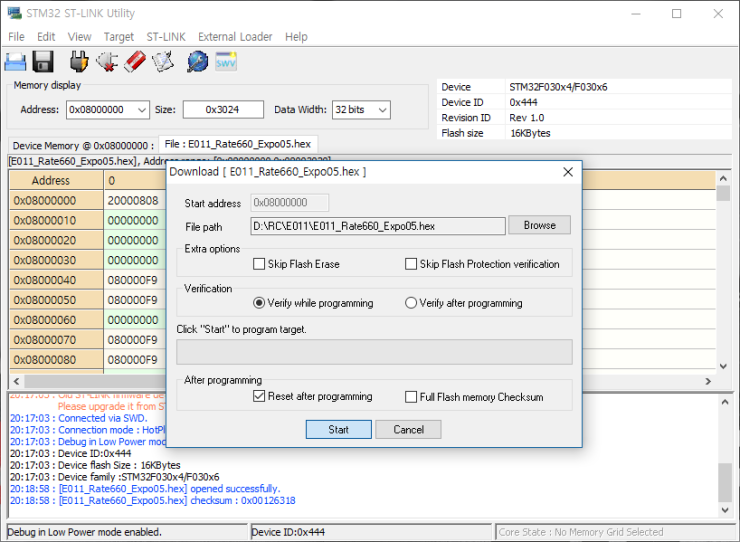
아래 그림과 같이 창이 뜹니다.
아래 File path 부분에 방금 열었던 펌웨어 파일의 경로가 보일겁니다.
전 설정을 바꿔서 컴파일한 헥사파일을 선택했습니다.
Start 버튼을 클릭하면 헥사파일을 쓰기 시작합니다.
아래 그림과 같이 로그창에 녹색 글씨처럼 OK 글자가 출력되면서 완료 됩니다.
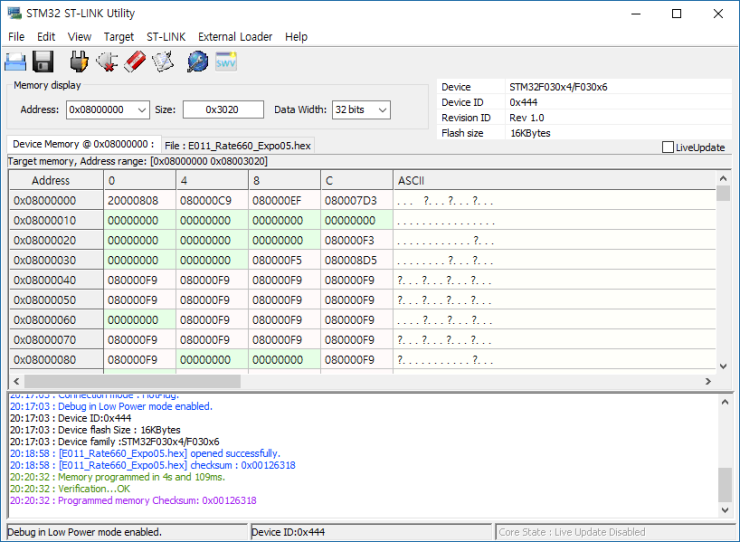
새로운 펌웨어로 변경되었습니다.
이제 보드에서 LED 가 깜박거립니다.
유틸 프로그램에서 연결을 해제해 줍니다.
USB를 분리합니다.
보드에서 배터리를 분리합니다.
보드에서 펌업을 위해 연결한 전선을 제거합니다.
기체를 조립합니다. 조립은 분해의 역순!
끝
이제 날리시면 되는데..
제스처 기능으로 아크로 모드와 레벨모드를 전환할 수 있습니다.
모드2 기준으로 오른쪽 조종기 스틱을
9시 방향 -> 중립 -> 9시 방향 -> 중립 -> 6시방향 으로 움직이면
기체의 LED가 깜박거리면서 아크로 모드로 설정됩니다.
오른쪽 조종기 스틱을 3시 -> 중립 -> 3시 -> 중립 -> 6시 로 하면
LED가 깜박이면서 레벨모드로 전환됩니다.
'레이싱드론' 카테고리의 다른 글
| 9XR RSSI setting (0) | 2017.02.26 |
|---|---|
| 9XR PRO와 XJT, X8R X4R Telemetry 설정 (0) | 2016.10.22 |
| QAV-R 220 조립 (0) | 2016.10.02 |

Admin K























